


注意
此示例兼容 Gymnasium 版本 1.2.0。
使用表格Q学习解决Frozenlake问题¶
本教程使用表格Q学习为FrozenLake训练一个智能体。
在这篇文章中,我们将使用Q学习算法,比较强化学习 Gymnasium 包中的 FrozenLake 环境上各种不同大小的地图。
首先,让我们导入一些必要的依赖项。
# Author: Andrea Pierré
# License: MIT License
from typing import NamedTuple
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
import seaborn as sns
from tqdm import tqdm
import gymnasium as gym
from gymnasium.envs.toy_text.frozen_lake import generate_random_map
sns.set_theme()
# %load_ext lab_black
我们将使用的参数¶
class Params(NamedTuple):
total_episodes: int # Total episodes
learning_rate: float # Learning rate
gamma: float # Discounting rate
epsilon: float # Exploration probability
map_size: int # Number of tiles of one side of the squared environment
seed: int # Define a seed so that we get reproducible results
is_slippery: bool # If true the player will move in intended direction with probability of 1/3 else will move in either perpendicular direction with equal probability of 1/3 in both directions
n_runs: int # Number of runs
action_size: int # Number of possible actions
state_size: int # Number of possible states
proba_frozen: float # Probability that a tile is frozen
params = Params(
total_episodes=2000,
learning_rate=0.8,
gamma=0.95,
epsilon=0.1,
map_size=5,
seed=123,
is_slippery=False,
n_runs=20,
action_size=None,
state_size=None,
proba_frozen=0.9,
)
params
# Set the seed
rng = np.random.default_rng(params.seed)
FrozenLake环境¶
env = gym.make(
"FrozenLake-v1",
is_slippery=params.is_slippery,
render_mode="rgb_array",
desc=generate_random_map(
size=params.map_size, p=params.proba_frozen, seed=params.seed
),
)
创建Q表¶
在本教程中,我们将使用Q学习作为学习算法,并使用\(\epsilon\)-贪婪策略来决定每一步选择哪个动作。您可以查看 参考部分 以回顾理论。现在,让我们创建Q表,将其初始化为零,行数为状态数,列数为动作数。
params = params._replace(action_size=env.action_space.n)
params = params._replace(state_size=env.observation_space.n)
print(f"Action size: {params.action_size}")
print(f"State size: {params.state_size}")
class Qlearning:
def __init__(self, learning_rate, gamma, state_size, action_size):
self.state_size = state_size
self.action_size = action_size
self.learning_rate = learning_rate
self.gamma = gamma
self.reset_qtable()
def update(self, state, action, reward, new_state):
"""Update Q(s,a):= Q(s,a) + lr [R(s,a) + gamma * max Q(s',a') - Q(s,a)]"""
delta = (
reward
+ self.gamma * np.max(self.qtable[new_state, :])
- self.qtable[state, action]
)
q_update = self.qtable[state, action] + self.learning_rate * delta
return q_update
def reset_qtable(self):
"""Reset the Q-table."""
self.qtable = np.zeros((self.state_size, self.action_size))
class EpsilonGreedy:
def __init__(self, epsilon):
self.epsilon = epsilon
def choose_action(self, action_space, state, qtable):
"""Choose an action `a` in the current world state (s)."""
# First we randomize a number
explor_exploit_tradeoff = rng.uniform(0, 1)
# Exploration
if explor_exploit_tradeoff < self.epsilon:
action = action_space.sample()
# Exploitation (taking the biggest Q-value for this state)
else:
# Break ties randomly
# Find the indices where the Q-value equals the maximum value
# Choose a random action from the indices where the Q-value is maximum
max_ids = np.where(qtable[state, :] == max(qtable[state, :]))[0]
action = rng.choice(max_ids)
return action
运行环境¶
让我们实例化学习器和探索器。
learner = Qlearning(
learning_rate=params.learning_rate,
gamma=params.gamma,
state_size=params.state_size,
action_size=params.action_size,
)
explorer = EpsilonGreedy(
epsilon=params.epsilon,
)
这将是我们运行环境的主函数,直到达到最大剧集数 params.total_episodes。为了考虑随机性,我们还会多次运行环境。
def run_env():
rewards = np.zeros((params.total_episodes, params.n_runs))
steps = np.zeros((params.total_episodes, params.n_runs))
episodes = np.arange(params.total_episodes)
qtables = np.zeros((params.n_runs, params.state_size, params.action_size))
all_states = []
all_actions = []
for run in range(params.n_runs): # Run several times to account for stochasticity
learner.reset_qtable() # Reset the Q-table between runs
for episode in tqdm(
episodes, desc=f"Run {run}/{params.n_runs} - Episodes", leave=False
):
state = env.reset(seed=params.seed)[0] # Reset the environment
step = 0
done = False
total_rewards = 0
while not done:
action = explorer.choose_action(
action_space=env.action_space, state=state, qtable=learner.qtable
)
# Log all states and actions
all_states.append(state)
all_actions.append(action)
# Take the action (a) and observe the outcome state(s') and reward (r)
new_state, reward, terminated, truncated, info = env.step(action)
done = terminated or truncated
learner.qtable[state, action] = learner.update(
state, action, reward, new_state
)
total_rewards += reward
step += 1
# Our new state is state
state = new_state
# Log all rewards and steps
rewards[episode, run] = total_rewards
steps[episode, run] = step
qtables[run, :, :] = learner.qtable
return rewards, steps, episodes, qtables, all_states, all_actions
可视化¶
为了方便使用Seaborn绘制结果,我们将把模拟的主要结果保存在Pandas数据框中。
def postprocess(episodes, params, rewards, steps, map_size):
"""Convert the results of the simulation in dataframes."""
res = pd.DataFrame(
data={
"Episodes": np.tile(episodes, reps=params.n_runs),
"Rewards": rewards.flatten(order="F"),
"Steps": steps.flatten(order="F"),
}
)
res["cum_rewards"] = rewards.cumsum(axis=0).flatten(order="F")
res["map_size"] = np.repeat(f"{map_size}x{map_size}", res.shape[0])
st = pd.DataFrame(data={"Episodes": episodes, "Steps": steps.mean(axis=1)})
st["map_size"] = np.repeat(f"{map_size}x{map_size}", st.shape[0])
return res, st
我们希望在最后绘制智能体学习到的策略。为此,我们将:1. 从Q表中提取每个状态的最佳Q值,2. 获取这些Q值对应的最佳动作,3. 将每个动作映射到箭头以便于可视化。
def qtable_directions_map(qtable, map_size):
"""Get the best learned action & map it to arrows."""
qtable_val_max = qtable.max(axis=1).reshape(map_size, map_size)
qtable_best_action = np.argmax(qtable, axis=1).reshape(map_size, map_size)
directions = {0: "←", 1: "↓", 2: "→", 3: "↑"}
qtable_directions = np.empty(qtable_best_action.flatten().shape, dtype=str)
eps = np.finfo(float).eps # Minimum float number on the machine
for idx, val in enumerate(qtable_best_action.flatten()):
if qtable_val_max.flatten()[idx] > eps:
# Assign an arrow only if a minimal Q-value has been learned as best action
# otherwise since 0 is a direction, it also gets mapped on the tiles where
# it didn't actually learn anything
qtable_directions[idx] = directions[val]
qtable_directions = qtable_directions.reshape(map_size, map_size)
return qtable_val_max, qtable_directions
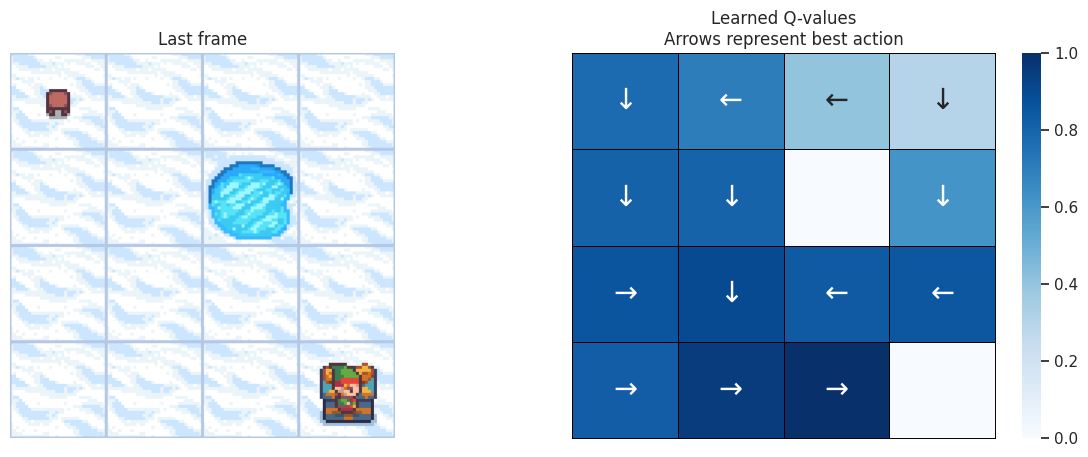
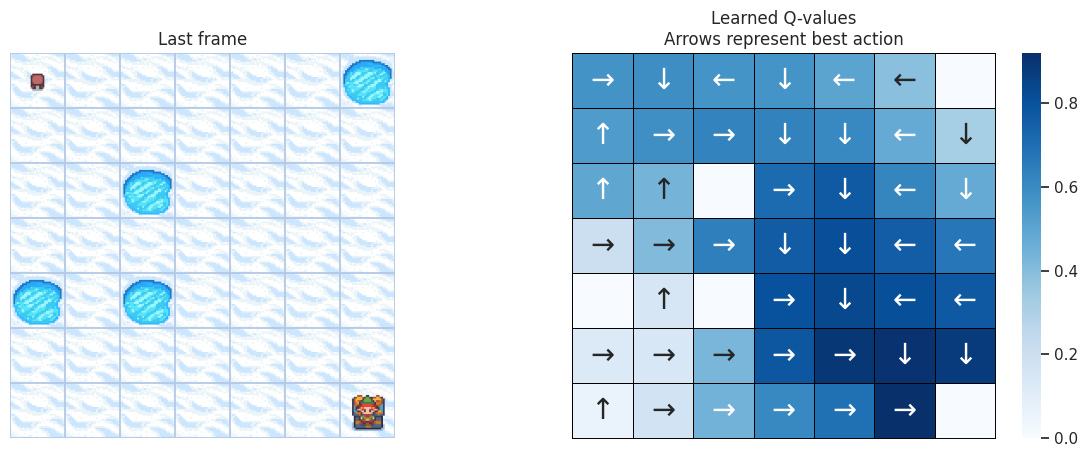
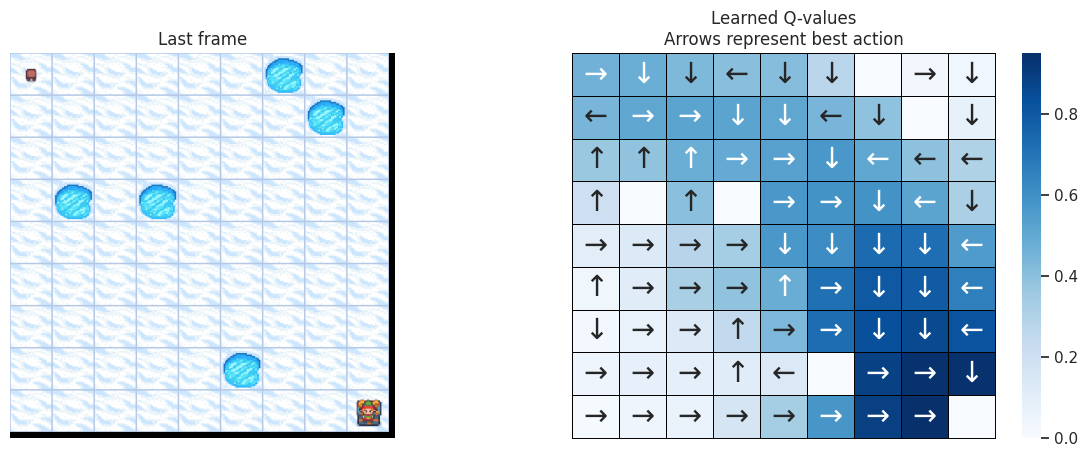
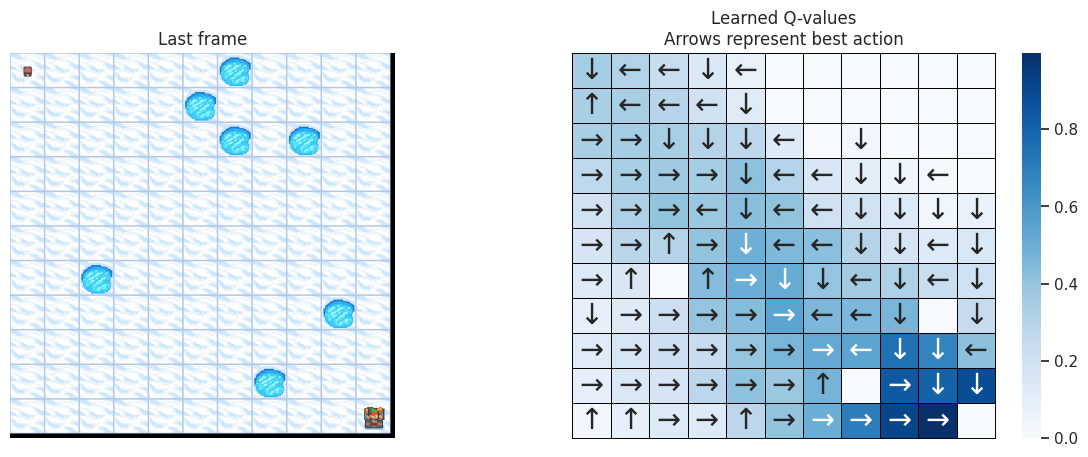
使用以下函数,我们将在左侧绘制模拟的最后一帧。如果智能体学会了一个好的策略来解决任务,我们期望在视频的最后一帧中看到它位于宝藏的方块上。在右侧,我们将绘制智能体学习到的策略。每个箭头将代表每个方块/状态应选择的最佳动作。
def plot_q_values_map(qtable, env, map_size):
"""Plot the last frame of the simulation and the policy learned."""
qtable_val_max, qtable_directions = qtable_directions_map(qtable, map_size)
# Plot the last frame
fig, ax = plt.subplots(nrows=1, ncols=2, figsize=(15, 5))
ax[0].imshow(env.render())
ax[0].axis("off")
ax[0].set_title("Last frame")
# Plot the policy
sns.heatmap(
qtable_val_max,
annot=qtable_directions,
fmt="",
ax=ax[1],
cmap=sns.color_palette("Blues", as_cmap=True),
linewidths=0.7,
linecolor="black",
xticklabels=[],
yticklabels=[],
annot_kws={"fontsize": "xx-large"},
).set(title="Learned Q-values\nArrows represent best action")
for _, spine in ax[1].spines.items():
spine.set_visible(True)
spine.set_linewidth(0.7)
spine.set_color("black")
plt.show()
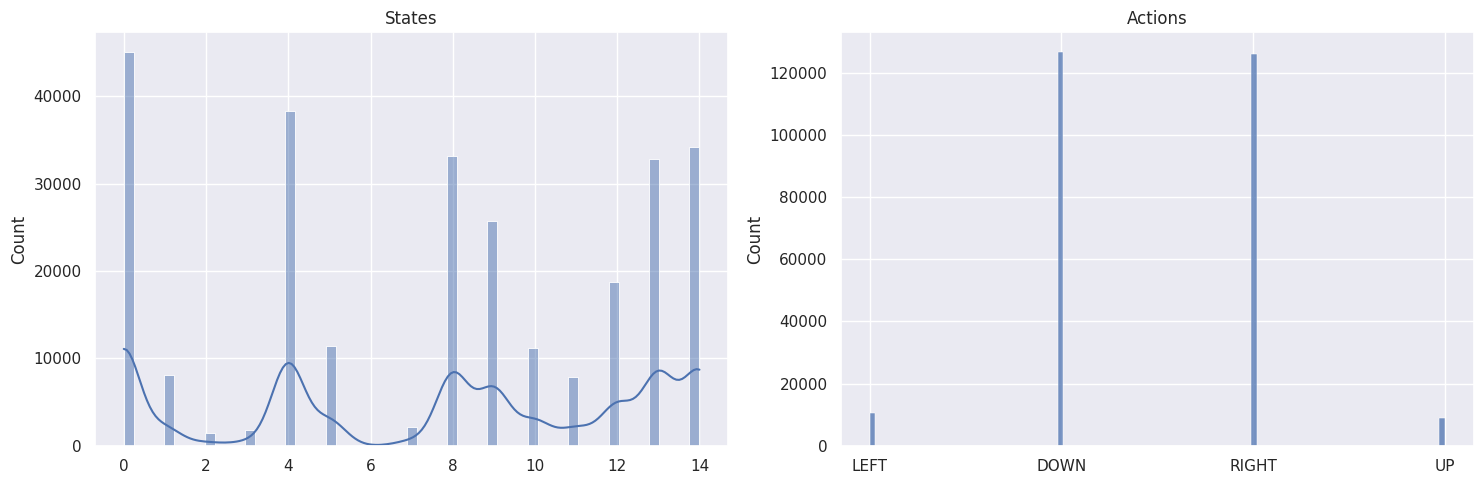
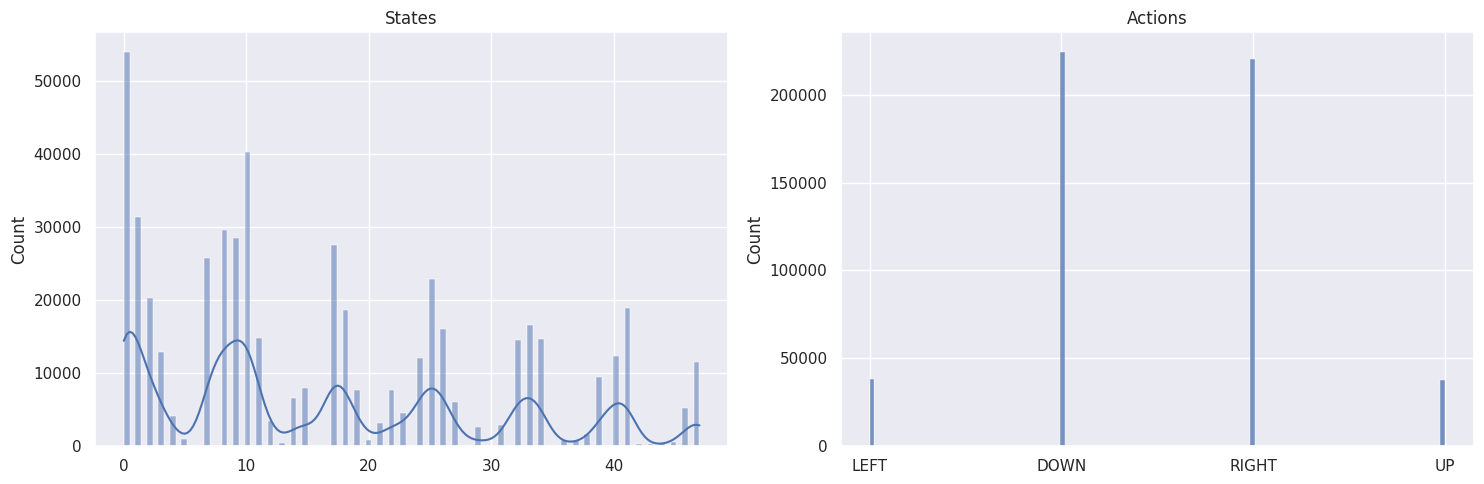
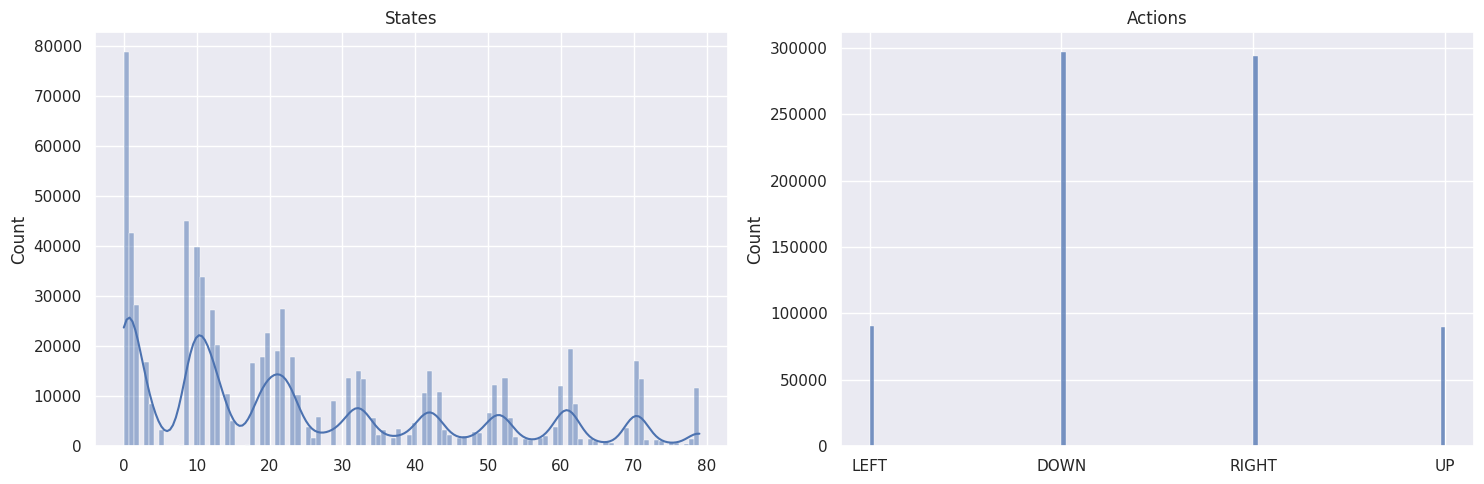
作为健全性检查,我们将使用以下函数绘制状态和动作的分布。
def plot_states_actions_distribution(states, actions, map_size):
"""Plot the distributions of states and actions."""
labels = {"LEFT": 0, "DOWN": 1, "RIGHT": 2, "UP": 3}
fig, ax = plt.subplots(nrows=1, ncols=2, figsize=(15, 5))
sns.histplot(data=states, ax=ax[0], kde=True)
ax[0].set_title("States")
sns.histplot(data=actions, ax=ax[1])
ax[1].set_xticks(list(labels.values()), labels=labels.keys())
ax[1].set_title("Actions")
fig.tight_layout()
plt.show()
现在我们将在几个不断增大的地图尺寸上运行我们的智能体:- \(4 \times 4\),- \(7 \times 7\),- \(9 \times 9\),- \(11 \times 11\)。
整合所有
map_sizes = [4, 7, 9, 11]
res_all = pd.DataFrame()
st_all = pd.DataFrame()
for map_size in map_sizes:
env = gym.make(
"FrozenLake-v1",
is_slippery=params.is_slippery,
render_mode="rgb_array",
desc=generate_random_map(
size=map_size, p=params.proba_frozen, seed=params.seed
),
)
params = params._replace(action_size=env.action_space.n)
params = params._replace(state_size=env.observation_space.n)
env.action_space.seed(
params.seed
) # Set the seed to get reproducible results when sampling the action space
learner = Qlearning(
learning_rate=params.learning_rate,
gamma=params.gamma,
state_size=params.state_size,
action_size=params.action_size,
)
explorer = EpsilonGreedy(
epsilon=params.epsilon,
)
print(f"Map size: {map_size}x{map_size}")
rewards, steps, episodes, qtables, all_states, all_actions = run_env()
# Save the results in dataframes
res, st = postprocess(episodes, params, rewards, steps, map_size)
res_all = pd.concat([res_all, res])
st_all = pd.concat([st_all, st])
qtable = qtables.mean(axis=0) # Average the Q-table between runs
plot_states_actions_distribution(
states=all_states, actions=all_actions, map_size=map_size
) # Sanity check
plot_q_values_map(qtable, env, map_size)
env.close()
地图尺寸:\(4 \times 4\)¶
地图尺寸:\(7 \times 7\)¶
地图尺寸:\(9 \times 9\)¶
地图尺寸:\(11 \times 11\)¶
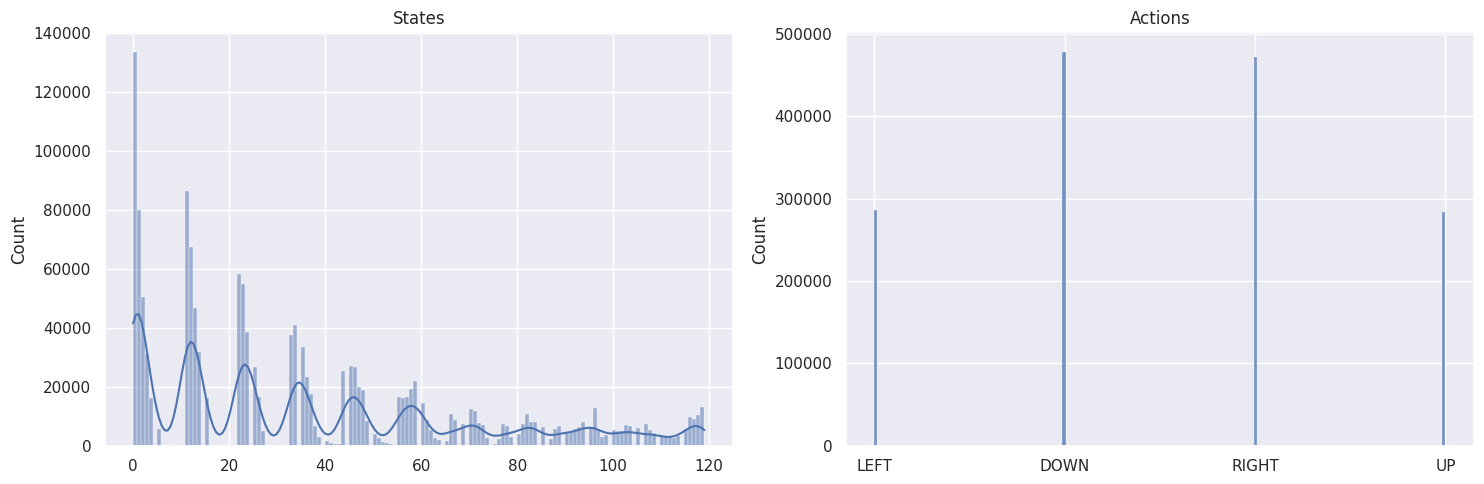
DOWN 和 RIGHT 动作被选择的次数更多,这很有道理,因为智能体从地图的左上角开始,需要找到通往右下角的路径。此外,地图越大,离起始状态越远的状态/方块被访问的就越少。
为了检查我们的智能体是否正在学习,我们希望绘制奖励的累积和,以及完成剧集所需的步数。如果我们的智能体正在学习,我们期望看到累积奖励增加,而解决任务所需的步数减少。
def plot_steps_and_rewards(rewards_df, steps_df):
"""Plot the steps and rewards from dataframes."""
fig, ax = plt.subplots(nrows=1, ncols=2, figsize=(15, 5))
sns.lineplot(
data=rewards_df, x="Episodes", y="cum_rewards", hue="map_size", ax=ax[0]
)
ax[0].set(ylabel="Cumulated rewards")
sns.lineplot(data=steps_df, x="Episodes", y="Steps", hue="map_size", ax=ax[1])
ax[1].set(ylabel="Averaged steps number")
for axi in ax:
axi.legend(title="map size")
fig.tight_layout()
plt.show()
plot_steps_and_rewards(res_all, st_all)
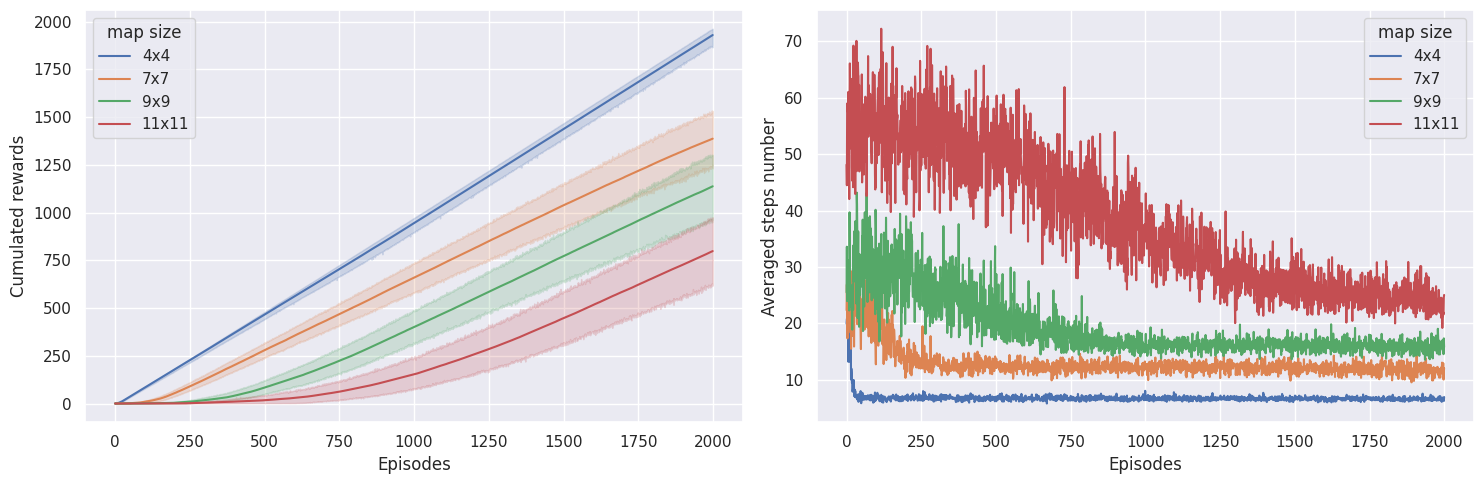
在\(4 \times 4\)地图上,学习收敛得非常快;而在\(7 \times 7\)地图上,智能体需要约\(\sim 300\)个剧集;在\(9 \times 9\)地图上,需要约\(\sim 800\)个剧集;在\(11 \times 11\)地图上,则需要约\(\sim 1800\)个剧集才能收敛。有趣的是,智能体在\(9 \times 9\)地图上获得的奖励似乎比在\(7 \times 7\)地图上更多,这可能意味着它在\(7 \times 7\)地图上没有达到最优策略。
最终,如果智能体没有获得任何奖励,奖励就不会传播到Q值中,智能体也就学不到任何东西。根据我在此环境中使用\(\epsilon\)-贪婪策略和这些超参数及环境设置的经验,地图尺寸大于\(11 \times 11\)的方块开始变得难以解决。也许使用不同的探索算法可以克服这一点。另一个影响很大的参数是proba_frozen,即方块结冰的概率。如果冰洞太多,即\(p<0.9\),Q学习将很难避免掉入冰洞并获取奖励信号。
参考文献¶
代码灵感来自 Thomas Simonini 的 深度强化学习课程 (http://simoninithomas.com/)
David Silver的课程,特别是第4课和第5课
Q-学习:离策略TD控制,出自《强化学习:导论》,作者Richard S. Sutton和Andrew G. Barto
Tim Miller(墨尔本大学)的强化学习导论