


摆锤¶

此环境是经典控制环境的一部分,其中包含有关该环境的一般信息。
动作空间 |
|
观测空间 |
|
导入 |
|
描述¶
倒立摆上摆问题基于控制理论中的经典问题。该系统由一个摆锤组成,一端连接到固定点,另一端自由。摆锤从随机位置开始,目标是对自由端施加扭矩,使其摆动到直立位置,重心恰好位于固定点正上方。
下图详细说明了用于实现摆锤动力学方程的坐标系。
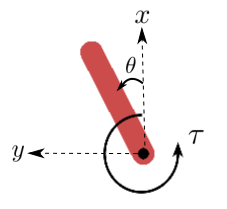
x-y:摆锤末端以米为单位的笛卡尔坐标。theta:以弧度表示的角度。tau:以牛顿米(N m)表示的扭矩。定义为正值表示逆时针方向。
动作空间¶
动作是一个形状为 (1,) 的 ndarray,表示施加到摆锤自由端的扭矩。
编号 |
动作 |
最小值 |
最大值 |
|---|---|---|---|
0 |
扭矩 |
-2.0 |
2.0 |
观测空间¶
观测值是一个形状为 (3,) 的 ndarray,表示摆锤自由端的 x-y 坐标及其角速度。
编号 |
观测值 |
最小值 |
最大值 |
|---|---|---|---|
0 |
x = cos(theta) |
-1.0 |
1.0 |
1 |
y = sin(theta) |
-1.0 |
1.0 |
2 |
角速度 |
-8.0 |
8.0 |
奖励¶
奖励函数定义为
r = -(theta2 + 0.1 * theta_dt2 + 0.001 * torque2)
其中 theta 是摆锤在 [-pi, pi] 之间归一化后的角度(0 表示直立位置)。根据上述方程,可以获得的最小奖励为 -(pi2 + 0.1 * 82 + 0.001 * 22) = -16.2736044,而最大奖励为零(摆锤直立,速度为零,未施加扭矩)。
初始状态¶
初始状态是 [-pi, pi] 范围内的随机角度和 [-1,1] 范围内的随机角速度。
剧集截断¶
剧集在 200 个时间步后截断。
参数¶
g: .
摆锤在 gymnasium.make 中有两个参数:render_mode 和 g,其中 g 表示用于计算摆锤动力学的重力加速度(单位为 m s-2)。默认值为 g = 10.0。在重置时,options 参数允许用户更改用于确定新随机状态的边界。
>>> import gymnasium as gym
>>> env = gym.make("Pendulum-v1", render_mode="rgb_array", g=9.81) # default g=10.0
>>> env
<TimeLimit<OrderEnforcing<PassiveEnvChecker<PendulumEnv<Pendulum-v1>>>>>
>>> env.reset(seed=123, options={"low": -0.7, "high": 0.5}) # default low=-0.6, high=-0.5
(array([ 0.4123625 , 0.91101986, -0.89235795], dtype=float32), {})
版本历史¶
v1: 简化数学方程,行为无差异。
v0: 初始版本发布